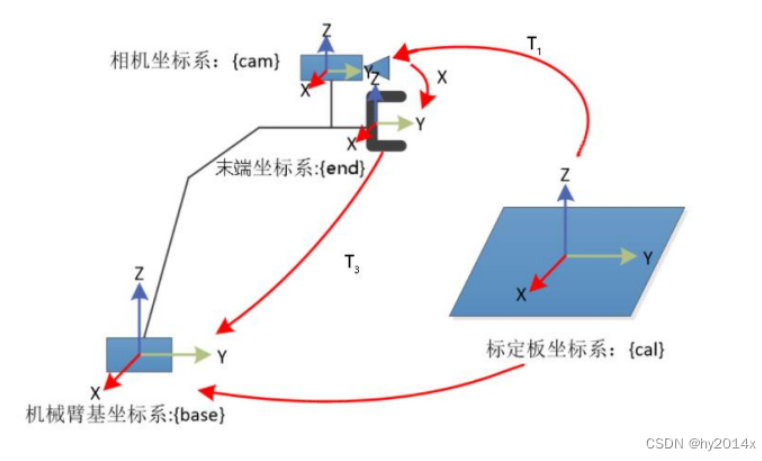
Eye-in-hand
任意移动两次机器臂,由于标定板和机器臂的基底是不动的,因此对于某个世界点,其在 base 坐标系和 cal 坐标系下的坐标值不变,在 end 坐标系和 cam 坐标系下的坐标值随着机器臂的运动而改变。
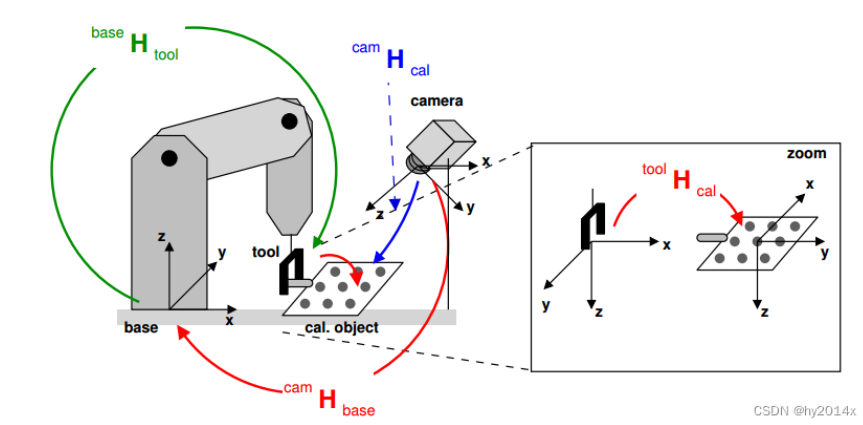
eye-to-hand
绿色已知关系,红色未知关系,需要的是base与cam的空间位置关系。


lingmeng 发布于 2023-06-12 443 次阅读
Eye-in-hand
任意移动两次机器臂,由于标定板和机器臂的基底是不动的,因此对于某个世界点,其在 base 坐标系和 cal 坐标系下的坐标值不变,在 end 坐标系和 cam 坐标系下的坐标值随着机器臂的运动而改变。
eye-to-hand
绿色已知关系,红色未知关系,需要的是base与cam的空间位置关系。
Comments NOTHING