

1. 版本选择:
不同版本的ubuntu对应不同的ROS版本:
✱Ubuntu 16.04 / ROS Kinetic
✱Ubuntu 18.04 / ROS Melodic
✱Ubuntu 20.04 / ROS Noetic
如果版本不同会出现下载失败情况,这里选择 Ubuntu 18.04/ROS Melodic演示
2设置源:
快捷键Ctrl+Alt+T打开终端。
官方源:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'镜像源:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'3.设置秘钥:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654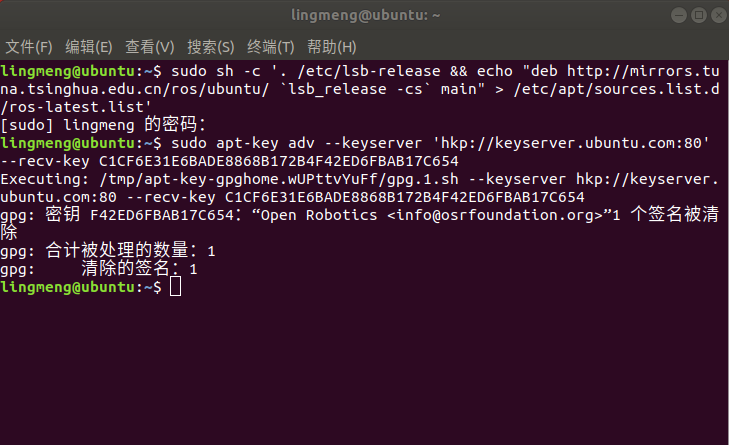
4.安装:
①确保Debian包索引是最新的:
sudo apt update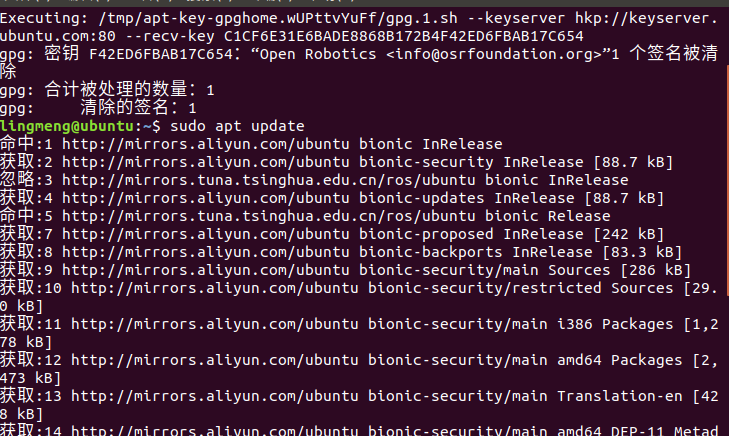
②执行ROS安装:
# Ubuntu 16.04
sudo apt install ros-kinetic-desktop-full# Ubuntu 18.04
sudo apt install ros-melodic-desktop-full安装过程比较长需要耐心等待。
初始化 rosdep:
sudo rosdep init出现如下提示是因为系统没有安装rosdep,使用命令:sudo apt install python-rosdep 后重试。

③配置ROS环境:
# Ubuntu 16.04
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc# Ubuntu 18.04
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc安装 ROS 额外依赖项
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential# Ubuntu 16.04
sudo apt install ros-kinetic-joint-state-publisher-gui# Ubuntu 18.04
sudo apt install ros-melodic-joint-state-publisher-gui5.验证安装
roscore当显示如下界面,则表示 ROS 安装成功
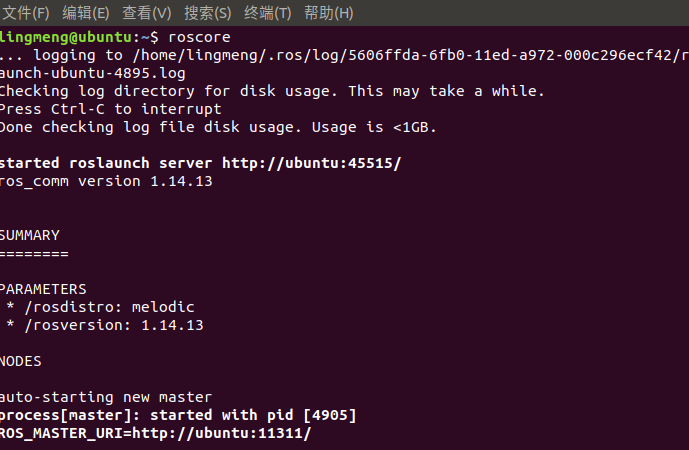
roscore命令启动了一个节点管理器,其作用就是用于节点管理,在一个ros系统中,有且只有一个,它是ros节点运行的前提,所以在执行启动ros节点前,第一步都需要执行roscore。
出现以下问题执行:sudo apt-get install ros-melodic-desktop

Comments 1 条评论